 Fraunhofer Institute for Manufacturing Engineering and Automation
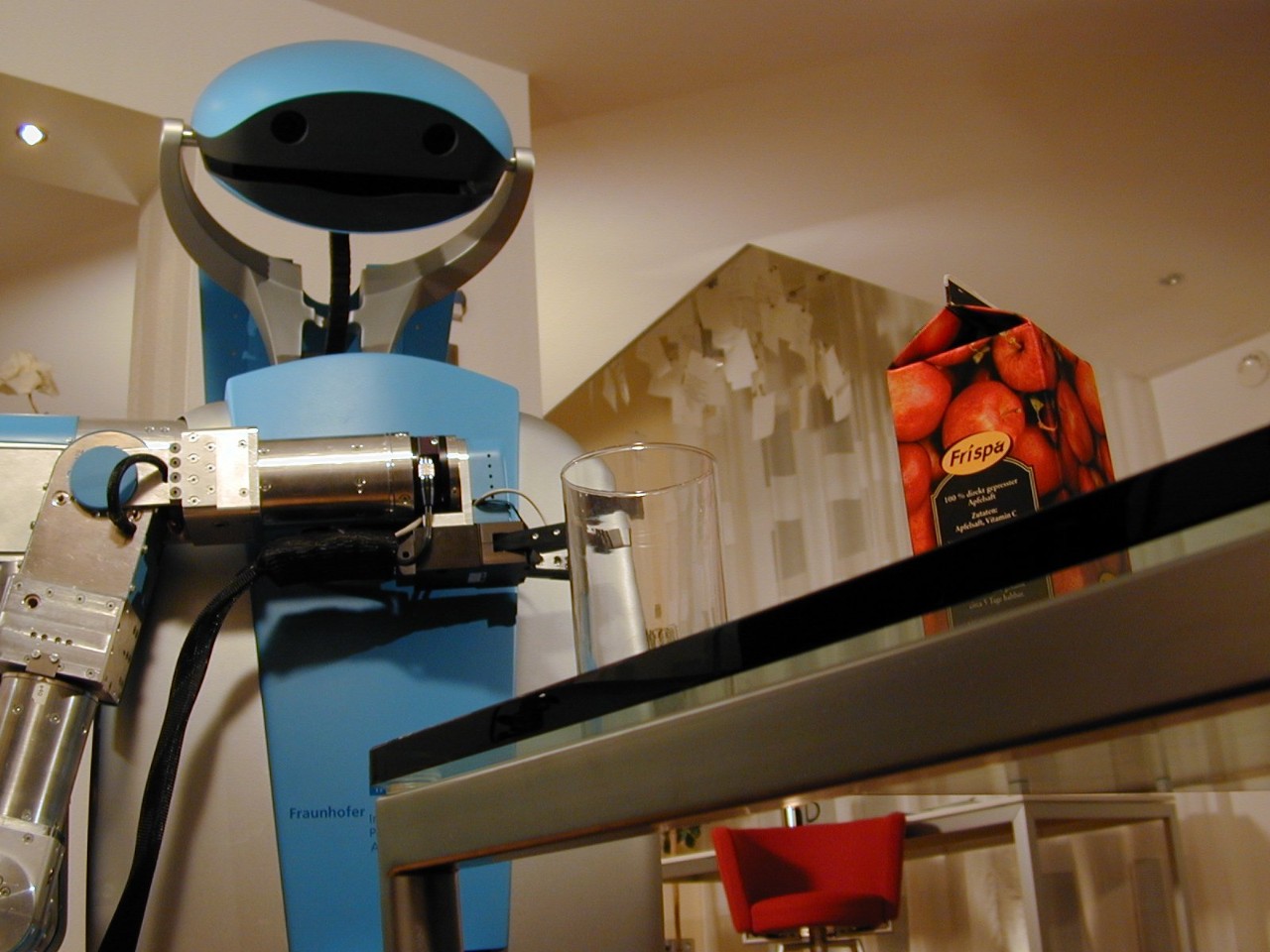
Fraunhofer Institute for Manufacturing Engineering and AutomationCare-O-bot® II, built in 2002, was equipped with a manipulator arm, adjustable walking supporters, and a tilting sensor head containing two cameras and a laser scanner for environment perception. The manipulator had specifically been developed for household use and was able to handle typical household objects. The flexible gripper attached to the manipulator was able to grasp different objects such as plates, mugs and bottles. A tablet-PC was used to command and to supervise the robot.
In addition to the mobility functions already solved in Care-O-bot® I, the second prototype was able to execute simple manipulation tasks autonomously and could be used as an intelligent walking support.






{kind=link}