Fraunhofer Institute for Manufacturing Engineering and Automation
Fraunhofer Institute for Manufacturing Engineering and AutomationResearch
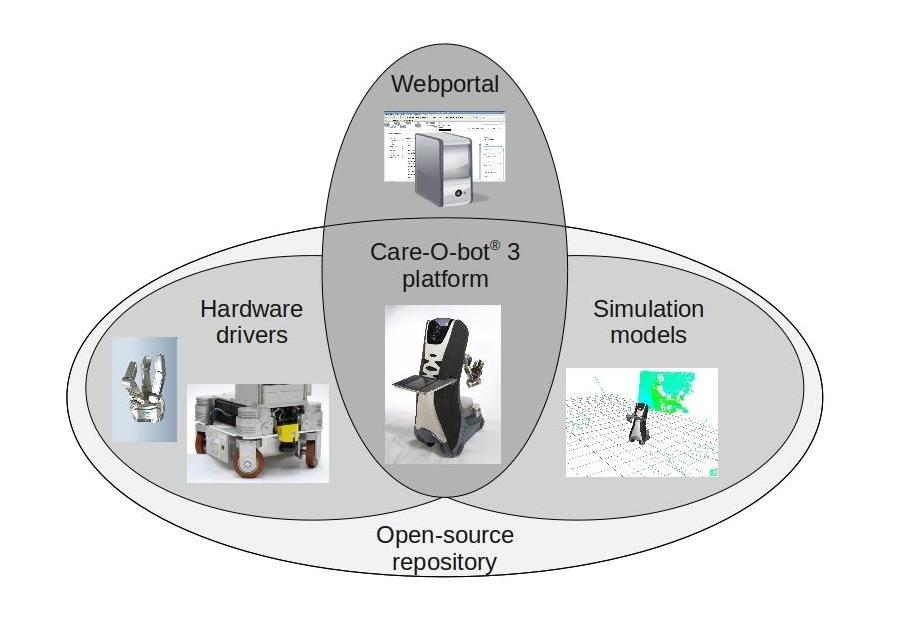
The Care-O-bot research initiative aims at making the Care-O-bot and rob@work systems available as high-tech research platforms. The main objectives to reach this goal are to
- provide a common open source repository for the hardware platform
- provide simulation models of all hardware components
All systems can be customized and equipped with sensors and actuators individually. Information about the distribution and configuration of Fraunhofer IPA's robots can be found here.
If you are interested in obtaining a Care-O-bot 3, Care-O-bot 4 or rob@work 3 platform, please contact us.